実際に使おうとして作っているわけではない。 動作が面白いから作って見るだけ。 メカものの製作の練習。

実際に使おうとして作っているわけではない。 動作が面白いから作って見るだけ。 メカものの製作の練習。
3Dプリンタで静物(非メカもの)で実用品を作るのは簡単。 というか普通、実用品しか作らない。 実用品以外はテストプリントぐらい。 でも、それだけだと3Dプリンタの用途が限られるので メカものにも手を出したい。 しかしメカものの実用品はハードルが高い。 本当に実用になるものを作り上げるには 膨大な時間を投入する必要がある。 実用にならなければ作る意味は無いとか 言っていると、いつまでも作れそうにないので、 練習から始めることにした。
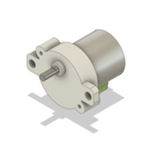
最初、マイクロサーボSG-90(の模造品?)で作ったのだが、 $2/個で買った模造品のせいか動作がスムーズではない。 回転角度も180度欲しいのだが、少し足りない。 静止状態でも若干動いてしまうのでサーボは諦め 以前秋月で販売していたCOPALのギア付きステッピングモータ SPG20-1331を使用することにした。 原点検出には パナソニックのAV620264を使用。 コネクタ付きケーブルも買えるのが良い感じ。
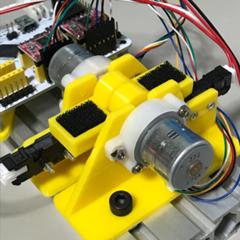
設計はステッピングモータとマイクロスイッチのモデル作成から始める。 ステッピングモータは データシートを見て図面を入力。 マイクロスイッチはメーカーのサイトから 図面のDXFファイルをダウンロードできたので、 これをFusion360のスケッチに読み込み、 適当な領域を選び押し出すとモデルができた。 各部の外観を適当に設定してやるとそれっぽい。 あとは、これらを適当に配置。間を埋めるように 部品を作成し設計は完了した。 今回作成したのは試作品。 全体の大まかな動きが確認することが目的なので、 実験のしやすさを重視している。
 |
 |
 |
| ステッピングモータのモデル | マイクロスイッチのモデル | 全体図 ... というか半分。 これ2個で完成。 |
3Dプリンタでの印刷では、いろいろとトラブルに見舞われた。 主な現象はフィラメントの詰まり。数回ヘッドを分解することになり、 ヘッドの構造には詳しくなった。原因は、使っているフィラメントが ABSだと思ってたのだが実はPLAで設定温度が高すぎたこと。 ノズルより上のフィラメントを送り出すステッピングモータのあたりまで フィラメントが柔らかくなり詰まってしまいフィラメントを送り出せなく なっていた模様。
ABSのフィラメントが無いから買い足したものを使ったので、 当然ABSだと思っていたら、実は間違ってPLAを注文していた。 Amazonで購入したのだが、ABSフィラメントで検索して 注文したつもりなのに、表示される関連商品にまどわされて PLAを注文していたようだ。
 |
 |
 |
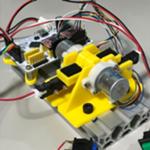
| 前から | 後ろから | 自作 PIC32MX220 + A4988ステッピングモータ・ドライバーモジュール基板 |
プリント完了後、部品を組立てアルミフレームに固定する。 なんでも固定できるアルミフレームは試作に便利だ。 全体を固定できると実験もやりやすい。 制御に使っているボードはPIC32MX220を使用した自作ボード。 A4988ステッピングモータ・ドライバー・モジュールが乗っている。
次は全体を1パッケージに、まとめて完成させる予定。 今はチップを乗せる部分を導電性スポンジを使用しているが、 これだと 1.6x0.8mmのチップ部品などでは埋もれてしまったり 飛んで行ってしまったりする。この部分はゴムシート に変更する。 本当に実作業に使用するのであれば、ゴムシートと フィラメントは導電性のものにすると良いのかもしれない。